はじめに
広い範囲を撮影したい場合に利用する魚眼レンズですが、魚眼レンズで撮影した動画は四隅が歪んでしまいます。物体検出や動体検知の精度を上げるためには、この歪みを補正する必要があり、歪み補正の処理のことをキャリブレーション(calibration)と呼びます。
このキャリブレーション処理、動画の各フレームごとに複雑な行列計算をする必要があるので、結構な処理量となります。これを4K動画に行うとなると大変です。「Gstreamerのcameracalibrateを使って、簡単に魚眼レンズの歪み補正を行う方法」や「OpenCV&Pythonで、簡単に魚眼レンズの歪み補正(Calibration)を行う方法」で紹介した、CPUを使った処理では、4K動画に対する30FPSでの処理は困難でした。
そこで、今回はJetson nanoに搭載のGPUを使って、このキャリブレーション処理を行い、Jetson nanoでリアルタイムキャリブレーション(4K@30fps)ができるか検証してみましたので、まとめます。
用意するもの
①ボードコンピュータ
今回の主役Jetson nanoです。Jetson nanoは安価な2GBモデルが発表になりましたが、今回は従来からある4Gモデルを利用します。

②魚眼レンズ付きカメラモジュール
魚眼レンズ付きカメラモジュールです。今回は180度まで撮影可能な以下のカメラを使います。USB接続で、4K@30fps(MJPG)までの動画撮影にも対応しています。

参考までに、このカメラの「v4l2-ctl –list-formats-ext」の結果を載せておきます。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 |
root@Jetson:~# v4l2-ctl --list-formats-ext ioctl: VIDIOC_ENUM_FMT Index : 0 Type : Video Capture Pixel Format: 'MJPG' (compressed) Name : Motion-JPEG Size: Discrete 3840x2160 Interval: Discrete 0.033s (30.000 fps) Interval: Discrete 0.040s (25.000 fps) Interval: Discrete 0.050s (20.000 fps) Interval: Discrete 0.067s (15.000 fps) Interval: Discrete 0.100s (10.000 fps) Interval: Discrete 0.200s (5.000 fps) Size: Discrete 1920x1080 Interval: Discrete 0.033s (30.000 fps) Interval: Discrete 0.040s (25.000 fps) Interval: Discrete 0.050s (20.000 fps) Interval: Discrete 0.067s (15.000 fps) Interval: Discrete 0.100s (10.000 fps) Interval: Discrete 0.200s (5.000 fps) Size: Discrete 2592x1944 Interval: Discrete 0.033s (30.000 fps) Interval: Discrete 0.040s (25.000 fps) Interval: Discrete 0.050s (20.000 fps) Interval: Discrete 0.067s (15.000 fps) Interval: Discrete 0.100s (10.000 fps) Interval: Discrete 0.200s (5.000 fps) Size: Discrete 2048x1536 Interval: Discrete 0.033s (30.000 fps) Interval: Discrete 0.040s (25.000 fps) Interval: Discrete 0.050s (20.000 fps) Interval: Discrete 0.067s (15.000 fps) Interval: Discrete 0.100s (10.000 fps) Interval: Discrete 0.200s (5.000 fps) Size: Discrete 1600x1200 Interval: Discrete 0.033s (30.000 fps) Interval: Discrete 0.040s (25.000 fps) Interval: Discrete 0.050s (20.000 fps) Interval: Discrete 0.067s (15.000 fps) Interval: Discrete 0.100s (10.000 fps) Interval: Discrete 0.200s (5.000 fps) Size: Discrete 1280x960 Interval: Discrete 0.033s (30.000 fps) Interval: Discrete 0.040s (25.000 fps) Interval: Discrete 0.050s (20.000 fps) Interval: Discrete 0.067s (15.000 fps) Interval: Discrete 0.100s (10.000 fps) Interval: Discrete 0.200s (5.000 fps) Size: Discrete 1280x720 Interval: Discrete 0.033s (30.000 fps) Interval: Discrete 0.040s (25.000 fps) Interval: Discrete 0.050s (20.000 fps) Interval: Discrete 0.067s (15.000 fps) Interval: Discrete 0.100s (10.000 fps) Interval: Discrete 0.200s (5.000 fps) Size: Discrete 1024x768 Interval: Discrete 0.033s (30.000 fps) Interval: Discrete 0.040s (25.000 fps) Interval: Discrete 0.050s (20.000 fps) Interval: Discrete 0.067s (15.000 fps) Interval: Discrete 0.100s (10.000 fps) Interval: Discrete 0.200s (5.000 fps) Size: Discrete 800x600 Interval: Discrete 0.033s (30.000 fps) Interval: Discrete 0.040s (25.000 fps) Interval: Discrete 0.050s (20.000 fps) Interval: Discrete 0.067s (15.000 fps) Interval: Discrete 0.100s (10.000 fps) Interval: Discrete 0.200s (5.000 fps) Size: Discrete 640x480 Interval: Discrete 0.033s (30.000 fps) Interval: Discrete 0.040s (25.000 fps) Interval: Discrete 0.050s (20.000 fps) Interval: Discrete 0.067s (15.000 fps) Interval: Discrete 0.100s (10.000 fps) Interval: Discrete 0.200s (5.000 fps) Size: Discrete 320x240 Interval: Discrete 0.033s (30.000 fps) Interval: Discrete 0.040s (25.000 fps) Interval: Discrete 0.050s (20.000 fps) Interval: Discrete 0.067s (15.000 fps) Interval: Discrete 0.100s (10.000 fps) Interval: Discrete 0.200s (5.000 fps) Index : 1 Type : Video Capture Pixel Format: 'YUYV' Name : YUYV 4:2:2 Size: Discrete 3840x2160 Interval: Discrete 1.000s (1.000 fps) Size: Discrete 1920x1080 Interval: Discrete 0.333s (3.000 fps) Size: Discrete 2592x1944 Interval: Discrete 1.000s (1.000 fps) Size: Discrete 2048x1536 Interval: Discrete 0.333s (3.000 fps) Size: Discrete 1600x1200 Interval: Discrete 0.333s (3.000 fps) Size: Discrete 1280x960 Interval: Discrete 0.200s (5.000 fps) Size: Discrete 1280x720 Interval: Discrete 0.100s (10.000 fps) Interval: Discrete 0.200s (5.000 fps) Size: Discrete 1024x768 Interval: Discrete 0.100s (10.000 fps) Interval: Discrete 0.200s (5.000 fps) Size: Discrete 800x600 Interval: Discrete 0.050s (20.000 fps) Interval: Discrete 0.067s (15.000 fps) Interval: Discrete 0.100s (10.000 fps) Interval: Discrete 0.200s (5.000 fps) Size: Discrete 640x480 Interval: Discrete 0.033s (30.000 fps) Interval: Discrete 0.040s (25.000 fps) Interval: Discrete 0.050s (20.000 fps) Interval: Discrete 0.067s (15.000 fps) Interval: Discrete 0.100s (10.000 fps) Interval: Discrete 0.200s (5.000 fps) Size: Discrete 320x240 Interval: Discrete 0.033s (30.000 fps) Interval: Discrete 0.040s (25.000 fps) Interval: Discrete 0.050s (20.000 fps) Interval: Discrete 0.067s (15.000 fps) Interval: Discrete 0.100s (10.000 fps) Interval: Discrete 0.200s (5.000 fps) root@Jetson:~# |
魚眼レンズ補正処理性能の検証
補正処理の実装
Gstreamerには、GPUを使って魚眼レンズの補正処理を行うエレメントは、用意されていませんので、自分でプログラムを実装する必要があります。
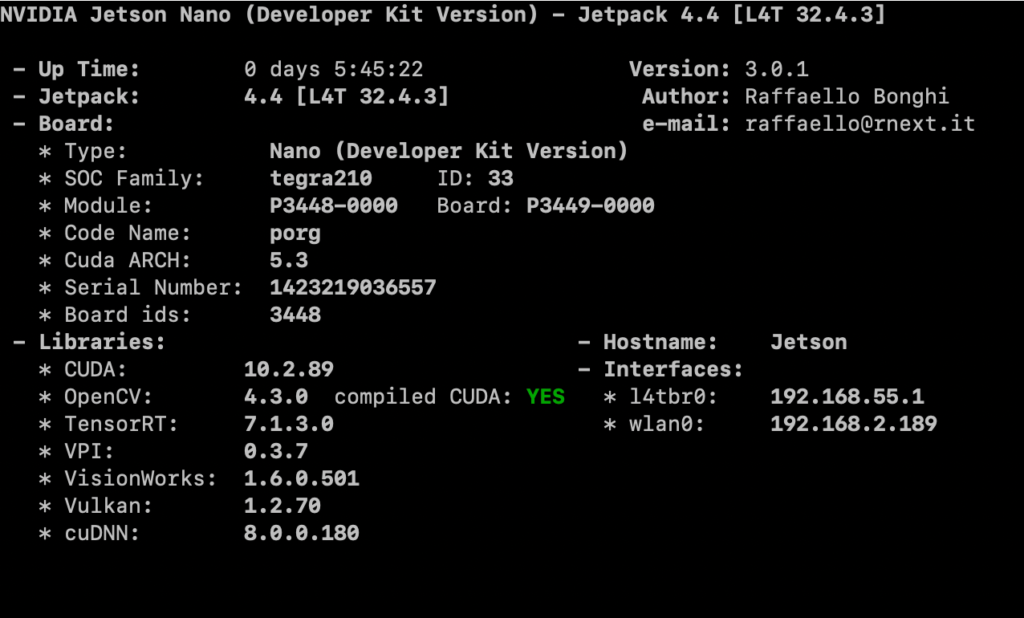
①環境の確認
魚眼レンズ補正処理の実装にあたって、以下の環境を用意しました。CUDAに対応したOpenCVがポイントです。CUDAに対応したOpenCVのインストール方法は、ここにあるシェススクリプトの通りです。
②Gstreamerパイプラインの設計
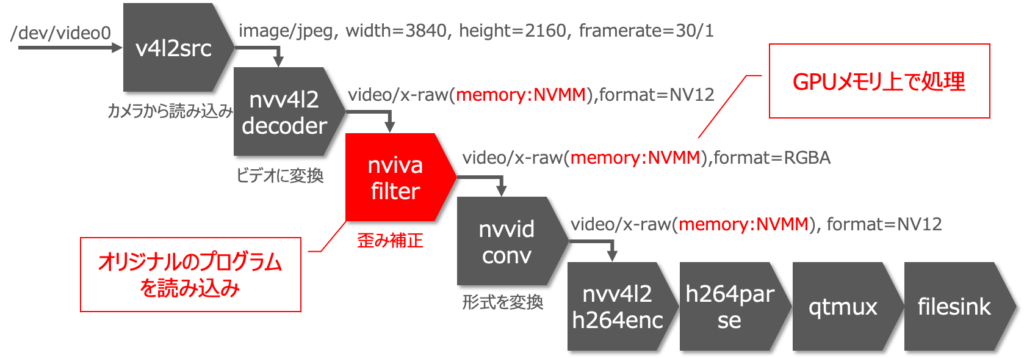
まずは、Gstreamerのパイプラインを設計します。以下が、USBカメラから取得した動画に対して歪み補正を行い、h264形式で保存するパイプラインです。
ポイントは2点です。1点目は、soライブラリを読み込んでオリジナルの処理を実行できるnvivafilterエレメントを利用する点です。ここで、nvivafilterに「cuda-process=true」のオプションをつけるとCUDAが利用可能です。2点目は、高速に処理するために、GPU上のメモリ「NVMM」でデータを扱う点です。
実際のパイプライン定義は以下の通りです。
|
1 2 3 4 5 6 7 8 |
$gst-launch-1.0 -e v4l2src device=/dev/video0 io-mode=2 ¥ ! image/jpeg, width=3840, height=2160, framerate=30/1 ¥ ! nvv4l2decoder mjpeg=1 ! 'video/x-raw(memory:NVMM),format=NV12' ! queue ¥ ! nvivafilter customer-lib-name=./libnvsample_cudaprocess.so cuda-process=true ¥ ! queue ! 'video/x-raw(memory:NVMM), format=RGBA' ¥ ! nvvidconv ! 'video/x-raw(memory:NVMM), format=NV12' ¥ ! nvv4l2h264enc ! h264parse ! queue2 ! qtmux ! filesink location=4K_h264HW_calib3.mp4 |
このパイプラインは4〜6行目の歪み補正の部分を除けば、4K@30fpsでの動画取得に成功しています。詳しくは「NVIDIA Jetson nanoで 4Kカメラは扱えるか?エンコード性能を徹底検証」を参照下さい。
③歪み補正処理の実装
次に、歪み補正処理を行うプログラムを以下の通り作成します。ベースは、NVIDIA提供の「nvsample_cudaprocess_src.tbz2」に含まれる「nvsample_cudaprocess.cu」です。私が作成したプログラムとMakefileも置いておきます。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 |
#include <stdio.h> #include <stdlib.h> #include <cuda.h> #include "customer_functions.h" #include "cudaEGL.h" #include "iva_metadata.h" #include "opencv2/core.hpp" #include "opencv2/calib3d.hpp" #include "opencv2/cudawarping.hpp" #include <opencv2/cudaarithm.hpp> const int max_width = 3840; const int max_height = 2160; static cv::cuda::GpuMat gpu_xmap, gpu_ymap; cv::cuda::Stream stream[1]; static void pre_process (void **sBaseAddr,unsigned int *smemsize,unsigned int *swidth,unsigned int *sheight,unsigned int *spitch,ColorFormat *sformat,unsigned int nsurfcount, void ** usrptr){} static void post_process (void **sBaseAddr,unsigned int *smemsize,unsigned int *swidth,unsigned int *sheight,unsigned int *spitch,ColorFormat *sformat,unsigned int nsurfcount,void ** usrptr){} /** * 魚眼レンズ補正を行う * */ static void cv_process_RGBA(void *pdata, int32_t width, int32_t height) { cv::cuda::GpuMat d_Mat_RGBA(height, width, CV_8UC4, pdata); cv::cuda::GpuMat d_Mat_RGBA_Src; d_Mat_RGBA.copyTo(d_Mat_RGBA_Src,stream[0]); cv::cuda::remap(d_Mat_RGBA_Src, d_Mat_RGBA, gpu_xmap, gpu_ymap, cv::INTER_NEAREST, cv::BORDER_CONSTANT, cv::Scalar(0.f, 0.f, 0.f, 0.f),stream[0]); } /** * Performs CUDA Operations on egl image. * @param image : EGL image */ static void gpu_process (EGLImageKHR image, void ** usrptr) { CUresult status; CUeglFrame eglFrame; CUgraphicsResource pResource = NULL; cudaFree(0); status = cuGraphicsEGLRegisterImage(&pResource, image, CU_GRAPHICS_MAP_RESOURCE_FLAGS_NONE); if (status != CUDA_SUCCESS) { printf("cuGraphicsEGLRegisterImage failed : %d \n", status); return; } status = cuGraphicsResourceGetMappedEglFrame( &eglFrame, pResource, 0, 0); if (status != CUDA_SUCCESS) { printf ("cuGraphicsSubResourceGetMappedArray failed\n"); } //printf ("魚眼補正処理を開始します! \n"); if (eglFrame.frameType == CU_EGL_FRAME_TYPE_PITCH) { if (eglFrame.eglColorFormat == CU_EGL_COLOR_FORMAT_ABGR) { cv_process_RGBA(eglFrame.frame.pPitch[0], eglFrame.width, eglFrame.height); } else printf ("Invalid eglcolorformat %d\n", eglFrame.eglColorFormat); } status = cuGraphicsUnregisterResource(pResource); if (status != CUDA_SUCCESS) { printf("cuGraphicsEGLUnRegisterResource failed: %d \n", status); } } extern "C" void init (CustomerFunction * pFuncs) { printf ("魚眼補正エレメントをロードしました! \n"); pFuncs->fPreProcess = pre_process; pFuncs->fGPUProcess = gpu_process; pFuncs->fPostProcess = post_process; cv::Mat xmap(max_height, max_width, CV_32FC1); cv::Mat ymap(max_height, max_width, CV_32FC1); cv::Mat cam(3, 3, cv::DataType<float>::type); cv::Mat dist(4, 1, cv::DataType<float>::type); cam.at<float>(0, 0) = 1569.08571848262500f; cam.at<float>(0, 1) = 0.0f; cam.at<float>(0, 2) = 1897.44471769631582f; cam.at<float>(1, 0) = 0.0f; cam.at<float>(1, 1) = 1590.39243583626353f; cam.at<float>(1, 2) = 1063.73079452522120f; cam.at<float>(2, 0) = 0.0f; cam.at<float>(2, 1) = 0.0f; cam.at<float>(2, 2) = 1.0f; dist.at<float>(0, 0) = -0.20963013646547f; dist.at<float>(1, 0) = 0.03491832650144f; dist.at<float>(2, 0) = 0.00160953572073f; dist.at<float>(3, 0) = -0.00896893124032f; dist.at<float>(4, 0) = -0.00194072642273f; cv::fisheye::initUndistortRectifyMap(cam, dist, cv::Mat(), cam, cv::Size(max_width, max_height), CV_32FC1, xmap, ymap); /* upload to GpuMats */ gpu_xmap.upload(xmap); gpu_ymap.upload(ymap); } extern "C" void deinit (void) { /* deinitialization */ } int main(int argc, char* argv[]) {} |
ポイントだけ解説しておきます。まず、74行目〜108行目の「init()」関数で、補正処理の初期設定を行います。82行目〜110行目では、補正処理に必要なカメラの歪み係数としてcamera.csvとdist.csvの値を設定します。次に103行目で、歪み計算に必要なxmap・ymapの値を計算し、GPUメモリにアップロードしておきます。カメラの歪み係数(camera.csvとdist.csv)の測定方法は「OpenCV&Pythonで、簡単に魚眼レンズの歪み補正(Calibration)を行う方法」で紹介していますので参照下さい。
また、40行目〜71行目の「gpu_process()」関数が、nvivafilterから呼ばれるフレームごとの処理を行う関数です。この関数の中ではEGLImageからRBGA形式のフレームを取得して後述する「cv_process_RGBA()」関数を呼び出しています。
次の26行目〜34行目の「cv_process_RGBA()」関数が、歪み補正を行う処理になります。28・29行目でGPU上のメモリを確保した後に、31行目で一度元の画像をコピーしておきます。そして、33行目で「cv::cuda::remap()」関数を使って歪み補正を行います。「cv::cuda::remap()」関数を用いることで、GPUを使って高速に処理が可能となっています。
④コンパイル
プログラムを作成したらコンパイルして、ライブラリファイル「libnvsample_cudaprocess.so」を作成します。コンパイルには、上からダウンロードしたMakefileを使うのが簡単ですが、もちろん手打ちでもOKです。ポイントとしては、OpenCVとCUDAライブラリ「-lopencv_core -lopencv_calib3d -lopencv_cudawarping」へのリンクを追加することです。
|
1 2 3 4 5 6 |
test@Jetson:~/nvsample_cudaprocess$ make /usr/local/cuda/bin/nvcc -ccbin g++ -I./ --shared -Xcompiler -fPIC -gencode arch=compute_30,code=sm_30 -gencode arch=compute_32,code=sm_32 -gencode arch=compute_35,code=sm_35 -gencode arch=compute_50,code=sm_50 -gencode arch=compute_53,code=sm_53 -gencode arch=compute_62,code=sm_62 -gencode arch=compute_72,code=sm_72 -gencode arch=compute_50,code=compute_50 -gencode arch=compute_72,code=compute_72 -o nvsample_cudaprocess.o -c nvsample_cudaprocess.cu /usr/local/cuda/bin/nvcc -ccbin g++ --shared -Xcompiler -fPIC -Xlinker --dynamic-linker=/lib/ld-linux-aarch64.so.1 -gencode arch=compute_30,code=sm_30 -gencode arch=compute_32,code=sm_32 -gencode arch=compute_35,code=sm_35 -gencode arch=compute_50,code=sm_50 -gencode arch=compute_53,code=sm_53 -gencode arch=compute_62,code=sm_62 -gencode arch=compute_72,code=sm_72 -gencode arch=compute_50,code=compute_50 -gencode arch=compute_72,code=compute_72 -L/usr/local/lib -lopencv_core -lopencv_calib3d -lopencv_cudawarping -lopencv_cudaarithm -o libnvsample_cudaprocess.so nvsample_cudaprocess.o -L/usr/lib/aarch64-linux-gnu -lEGL -lGLESv2 -L/usr/lib/aarch64-linux-gnu/tegra -lcuda -lrt test@Jetson:~/nvsample_cudaprocess$ ls -l *.so -rwxrwxr-x 1 test test 588848 10月 13 21:44 libnvsample_cudaprocess.so |
以上で、魚眼レンズ補正処理の実装は完了です。
補正処理の性能検証
ここからが本題のGPU(CUDA)を用いた魚眼レンズ補正処理の性能検証です。検証方法としては、上記の補正処理を含むパイプラインを実行してh264形式の動画を保存し、保存された動画をmediainfoコマンドで確認することで、FPSを確認します。また、パイプライン実行中のCPU/GPUの使用状況をJTOPコマンドで確認します。
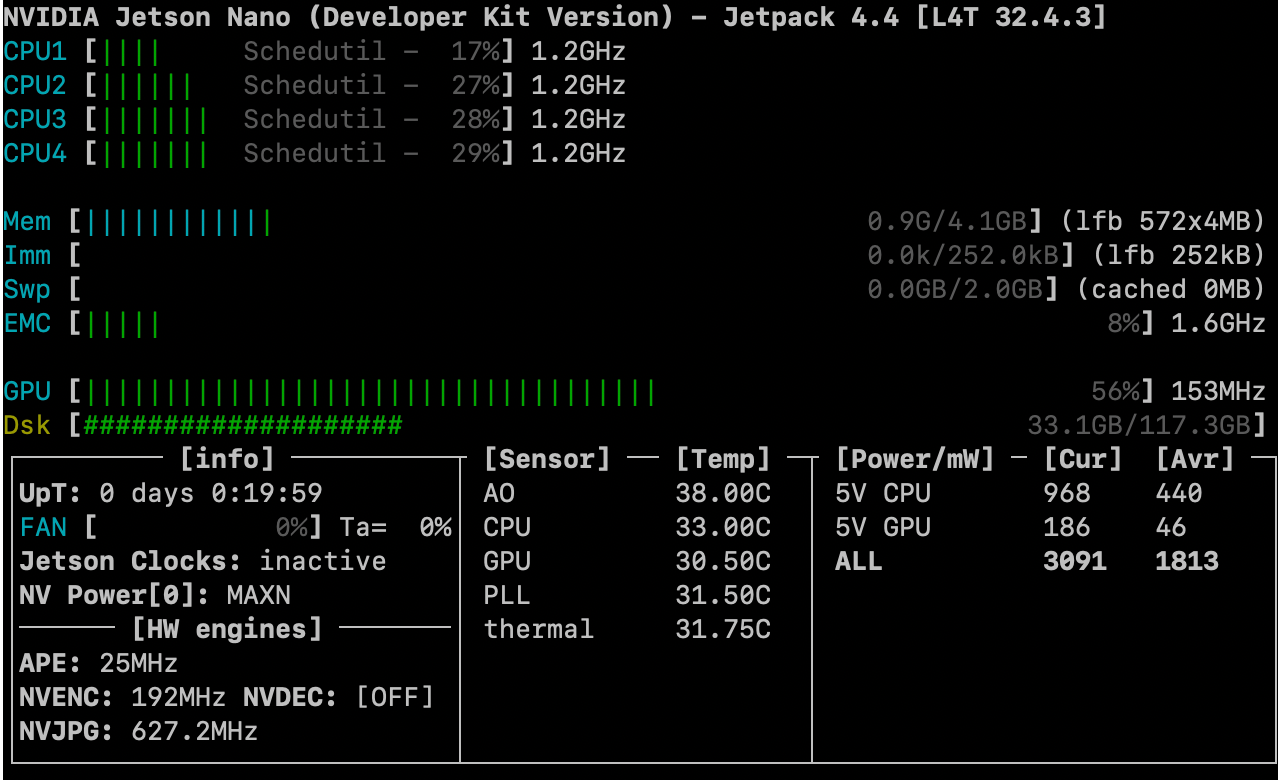
①800×600での検証
まずは、小手調べということで、800×600での検証結果です。結果は29.046FPS。30fps出ていると言って良いでしょう!JTOPの結果を見ても、CUDAでGPUを使って補正処理を行なっていることが分かります。
|
1 2 3 4 5 6 7 |
$ggst-launch-1.0 -e v4l2src device=/dev/video0 io-mode=2 ! image/jpeg, width=800, height=600, framerate=30/1 ! nvv4l2decoder mjpeg=1 ! 'video/x-raw(memory:NVMM),format=NV12' ! queue ! nvivafilter customer-lib-name=./libnvsample_cudaprocess.so cuda-process=true ! queue ! 'video/x-raw(memory:NVMM), format=RGBA' ! nvvidconv ! 'video/x-raw(memory:NVMM), format=NV12' ! nvv4l2h264enc ! h264parse ! queue2 ! qtmux ! filesink location=800_h264HW_calib.mp4 $mediainfo 800_h264HW_calib.mp4 ・・・省略・・・ Frame rate : 29.046 FPS Minimum frame rate : 2.016 FPS Maximum frame rate : 31.579 FPS |
②1600×1200
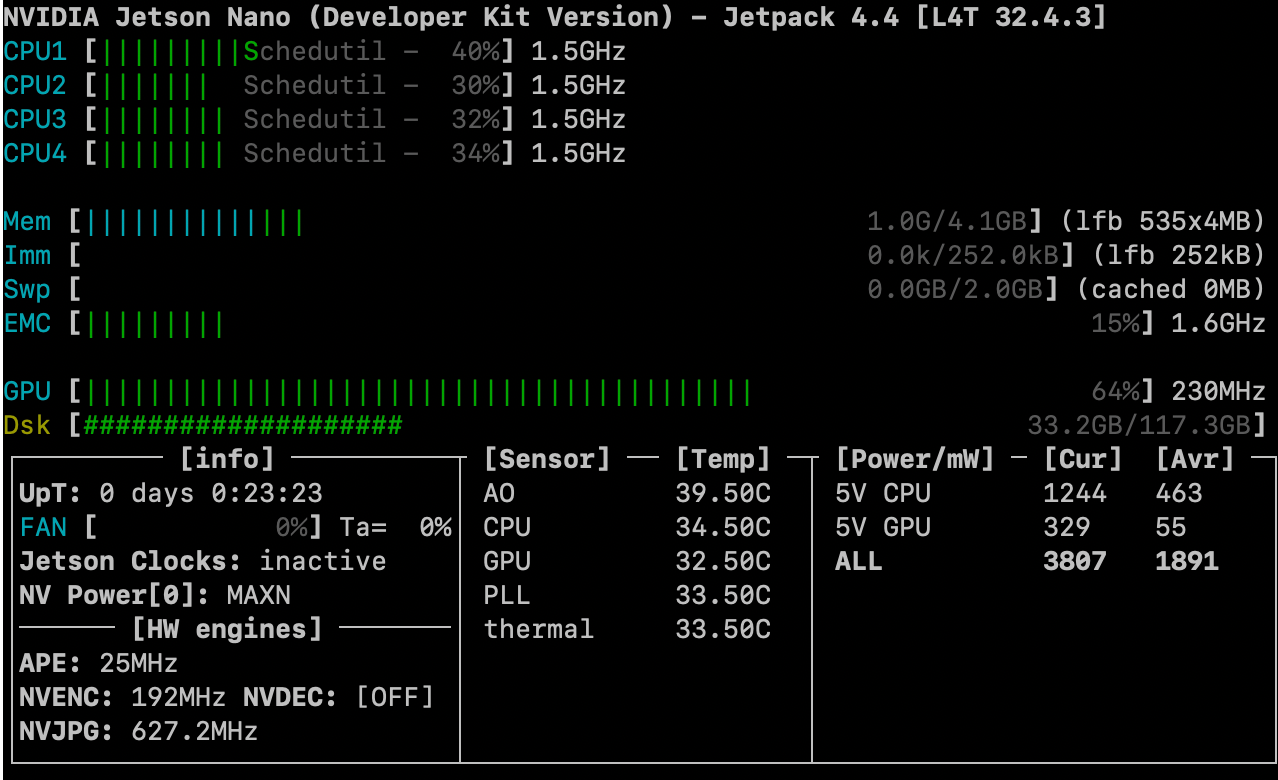
次に、1600×1200の検証結果です。結果は29.458FPS。まだまだ大丈夫ですね。800×600の時と比較するとGPUの周波数が230MHzに上がっています。
|
1 2 3 4 5 6 7 |
$gst-launch-1.0 -e v4l2src device=/dev/video0 io-mode=2 ! image/jpeg, width=1600, height=1200, framerate=30/1 ! nvv4l2decoder mjpeg=1 ! 'video/x-raw(memory:NVMM),format=NV12' ! queue ! nvivafilter customer-lib-name=./libnvsample_cudaprocess.so cuda-process=true ! queue ! 'video/x-raw(memory:NVMM), format=RGBA' ! nvvidconv ! 'video/x-raw(memory:NVMM), format=NV12' ! nvv4l2h264enc ! h264parse ! queue2 ! qtmux ! filesink location=1600_h264HW_calib.mp4 $mediainfo 1600_h264HW_calib.mp4 ・・・省略・・・ Frame rate : 29.458 FPS Minimum frame rate : 2.016 FPS Maximum frame rate : 31.579 FPS |
③1920×1080(フルHD)
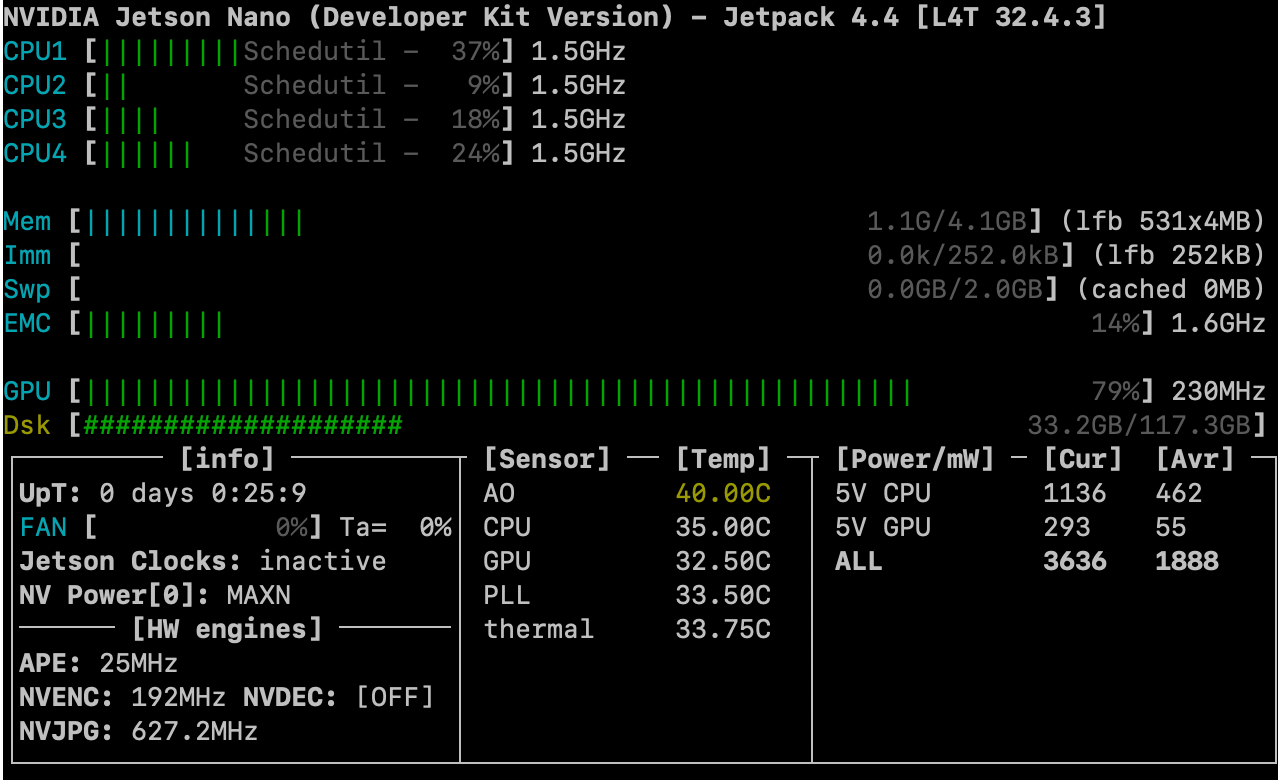
次は、1920×1080(フルHD)での検証結果です。結果は28.927FPS!フルHDでも、ほぼリアルタイムに補正処理ができています❗️
|
1 2 3 4 5 6 7 |
$gst-launch-1.0 -e v4l2src device=/dev/video0 io-mode=2 ! image/jpeg, width=1920, height=1080, framerate=30/1 ! nvv4l2decoder mjpeg=1 ! 'video/x-raw(memory:NVMM),format=NV12' ! queue ! nvivafilter customer-lib-name=./libnvsample_cudaprocess.so cuda-process=true ! queue ! 'video/x-raw(memory:NVMM), format=RGBA' ! nvvidconv ! 'video/x-raw(memory:NVMM), format=NV12' ! nvv4l2h264enc ! h264parse ! queue2 ! qtmux ! filesink location=1920_h264HW_calib.mp4 $mediainfo 1920_h264HW_calib.mp4 ・・・省略・・・ Frame rate : 28.927 FPS Minimum frame rate : 1.880 FPS Maximum frame rate : 31.579 FPS |
④3840×2160(4K)
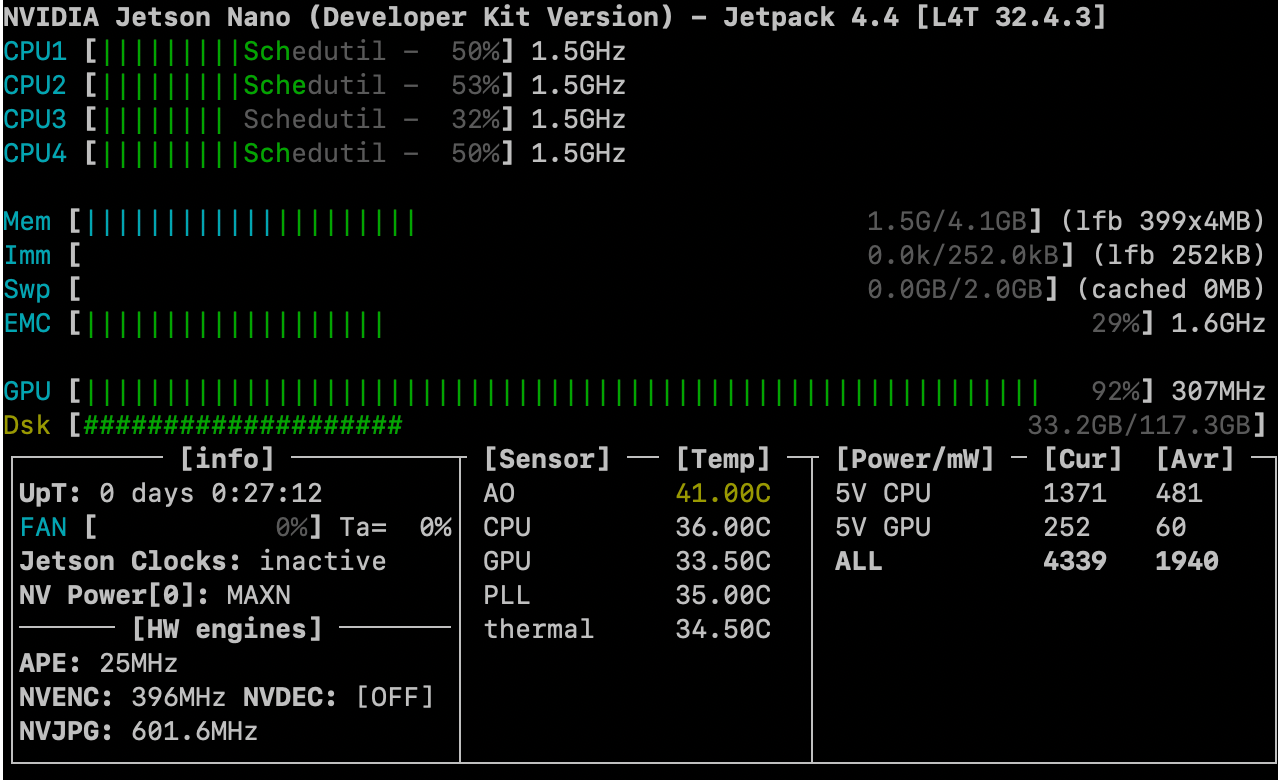
いよいよ、3840×2160(4K)での検証結果です。結果は19.452FPS・・・・。30FPS出ない😭GPUの周波数も307MHzと、フルHDの時と比べて高くなっていますが、30FPSは難しいようです。
|
1 2 3 4 5 6 7 |
$gst-launch-1.0 -e v4l2src device=/dev/video0 io-mode=2 ! image/jpeg, width=3840, height=2160, framerate=30/1 ! nvv4l2decoder mjpeg=1 ! 'video/x-raw(memory:NVMM),format=NV12' ! queue ! nvivafilter customer-lib-name=./libnvsample_cudaprocess.so cuda-process=true ! queue ! 'video/x-raw(memory:NVMM), format=RGBA' ! nvvidconv ! 'video/x-raw(memory:NVMM), format=NV12' ! nvv4l2h264enc ! h264parse ! queue2 ! qtmux ! filesink location=3840_h264HW_calib.mp4 $mediainfo 3840_h264HW_calib.mp4 ・・・省略・・・ Frame rate : 19.452 FPS Minimum frame rate : 1.506 FPS Maximum frame rate : 31.250 FPS |
ボトルネックの検証
3840×2160(4K)で、30FPSが出ない原因を調査するために、NVIDIA Visual ProfilerでGPUの使用状況の詳細を調査しました。
①GPU使用情報を採取
NVIDIA Visual Profilerで、GPUの使用状況を可視化するためには、アプリケーション実行時の情報をnvprofコマンドを用いて取得する必要があります。
以下のように、Gstreamerのパイプラインを一旦test.shに保存しておき、nvprofコマンドを通じてtest.shを実行します。この時、nvivafilterから呼ばれるオリジナルの処理は子プロセスとして実行されるので「–profile-child-processes」オプションをつけるのをお忘れなく!
nvprofコマンドを実行して、動画をしばらく保存し、「Ctrl+C」で中断すると、以下のようにnvvpファイルが作成されます。このファイルにGPUの使用情報が記録されます。
|
1 2 3 4 5 6 7 8 9 |
$echo "gst-launch-1.0 -e v4l2src device=/dev/video0 io-mode=2 ! image/jpeg, width=3840, height=2160,¥ framerate=30/1 ! nvv4l2decoder mjpeg=1 ! 'video/x-raw(memory:NVMM),format=NV12' ! queue ¥ ! nvivafilter customer-lib-name=./libnvsample_cudaprocess.so cuda-process=true ! queue ¥ ! 'video/x-raw(memory:NVMM), format=RGBA' ! nvvidconv ! 'video/x-raw(memory:NVMM), format=NV12' ¥ ! nvv4l2h264enc ! h264parse ! queue2 ! qtmux ! filesink location=3840_h264HW_calib.mp4" > test.sh #/usr/local/cuda-10.2/bin/nvprof -o ./pid%p.nvvp --profile-child-processes sh test.sh ・・・省略・・・ ==7892== Generated result file: /home/test/nvsample_cudaprocess/pid7892.nvvp |
②GPU処理情報の解析
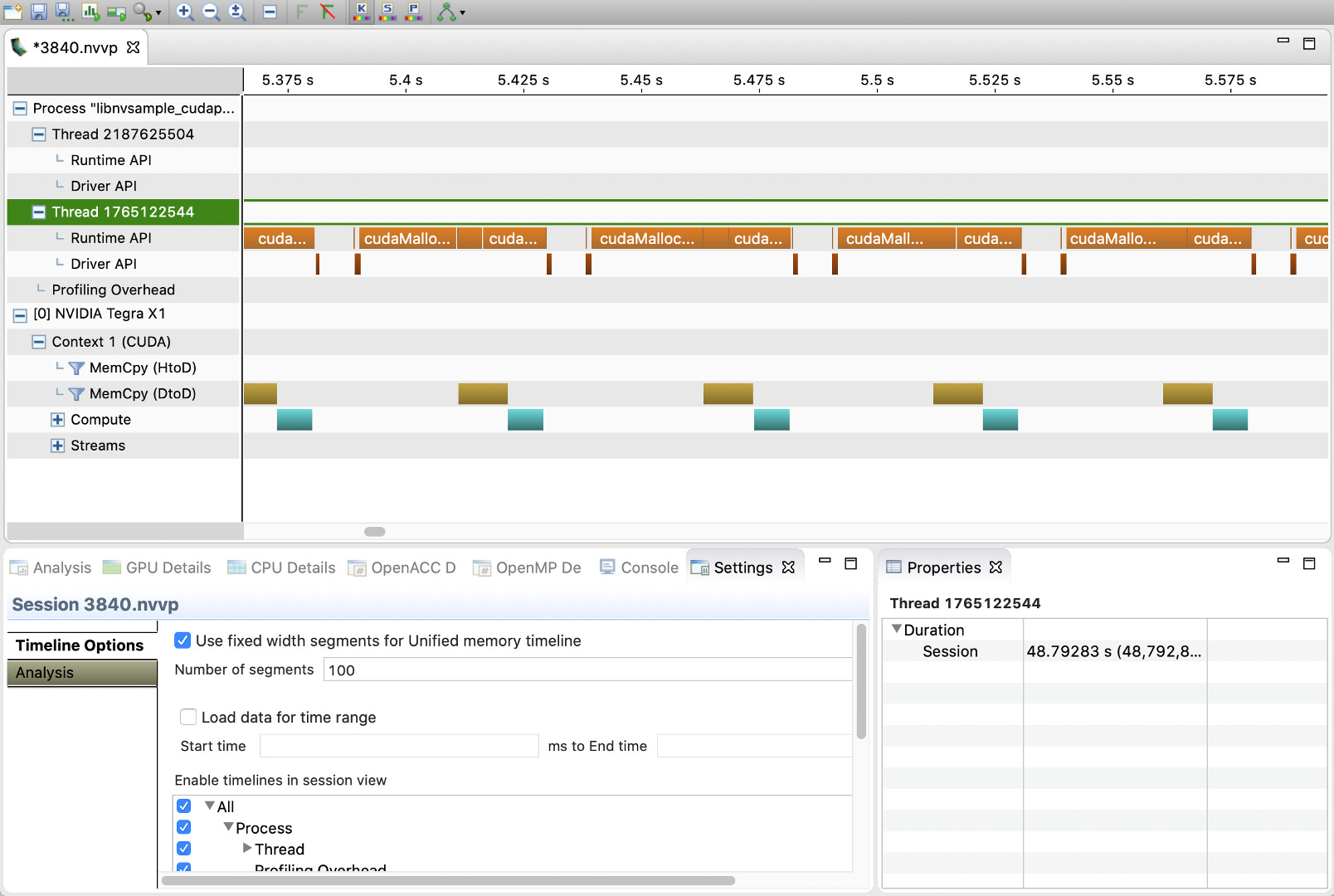
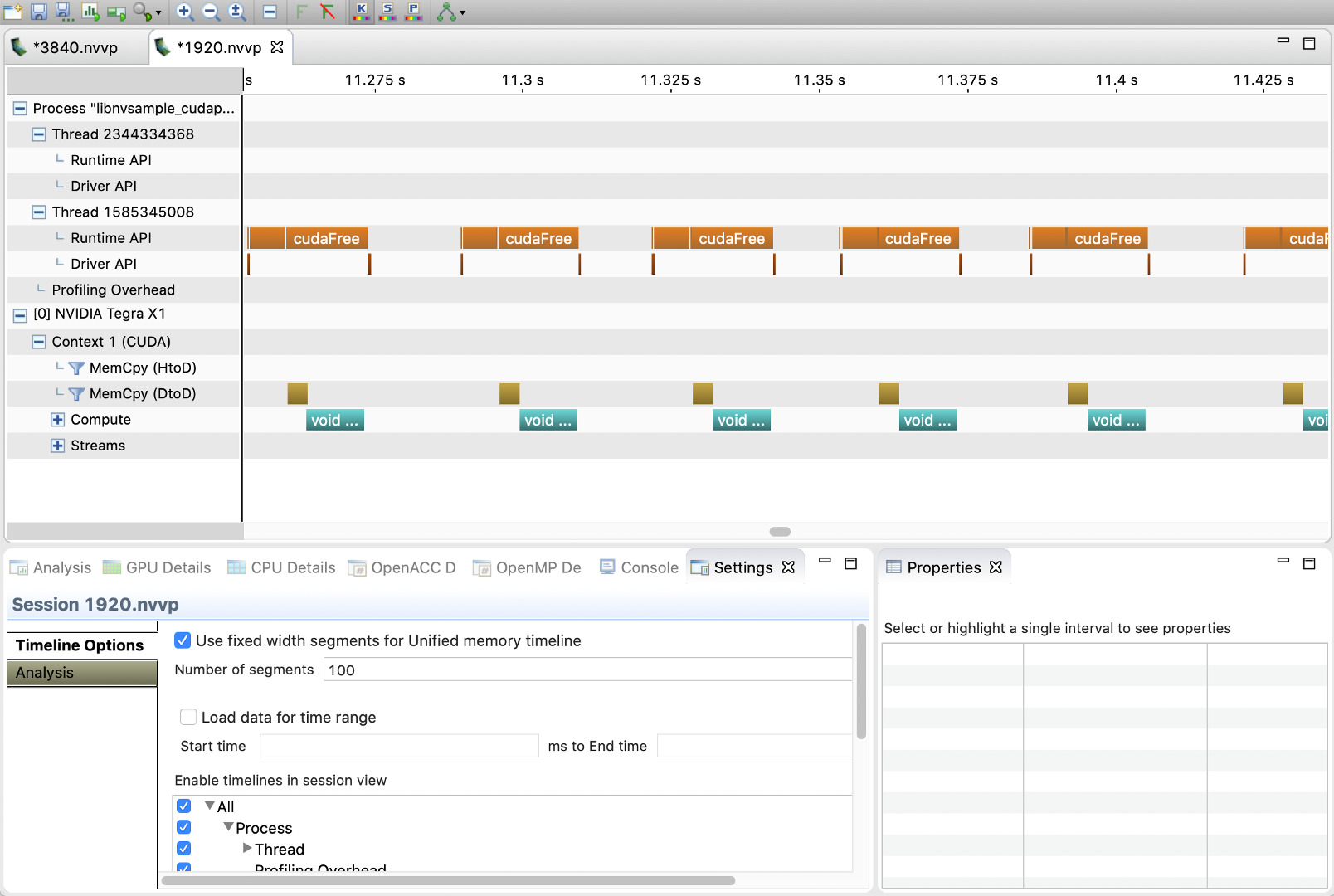
取得したnvvpファイルをNVIDIA Visual Profilerで開きます。すると、以下の画像のように時間軸に従って、GPU内でどのような処理が行われているか、可視化されます。
Runtime APIの行の規則的に現れるオレンジのバーの部分が、動画の各フレームに対して歪み補正処理を行なっている時間です。この中では、メモリ確保(cudaMallocPitch)処理、茶色のバーで表示されている画像のコピー処理(ソースコードの31行目)、緑色バーで表示されている補正処理(ソースコードの33行目)にかかる時間が分かります。
この結果より、1フレームの歪み補正処理に52m秒かかっていることが分かります。1000m/52m=19.23なので、結果として19FPSしか出ないということです💦30FPSを出すためには、1フレームにかかる時間を30mまで縮める必要があります。メモリ確保処理に時間が掛かっており、これを縮めたいのですが、方法が分かりません・・・。分かる方いらっしゃったら、教えて下さい。
参考までに、以下がフルHDの場合です。1フレームの処理に必要な時間は31m秒となり、なんとか30FPSが出ている状況です。
おわりに
今回は、Jetson nanoと魚眼レンズ付き4Kカメラを使って、魚眼レンズの補正処理の性能を検証してみました。今回の結論としては、フルHDまではJetson nanoでもリアルタイムに処理(30FPS)できる。ただし、4Kの場合には、リアルタイムの補正処理は厳しい(19FPS)という結果です。
このため、Jetson nanoでは、魚眼レンズ付き4Kカメラを利用してライブ映像を配信するという用途は、ちょっと辛いという事かと思います💦解決方法があれば、是非教えて下さい。
関連記事






コメント